
-
Background
- Unintended acceleration (UA) has become one of the most complained-about vehicle problems in recent history.
- UA refers to the occurrence of any degree of acceleration that the vehicle driver did not purposely cause to occur. An apparent loss of braking effectiveness often happened at the same time [NHTSA, 1989].
- UA was possibly caused by four major problems, which were pedal misapplication, unresponsive pedals, software failure and stuck throttle. Pedal misapplication was concluded to be the most plausible reason. However, the possibility of vehicle defects still could not be ruled out.
-
Objective
- Develop an integrated hybrid model-based and data-driven approach to detecting abnormal driving conditions.
- Vehicle data (e.g. velocity and throttle position) and traffic data (e.g. space headway) are proposed for use in the detection.
- In this task, abnormal driving conditions mainly refer to unintended acceleration.
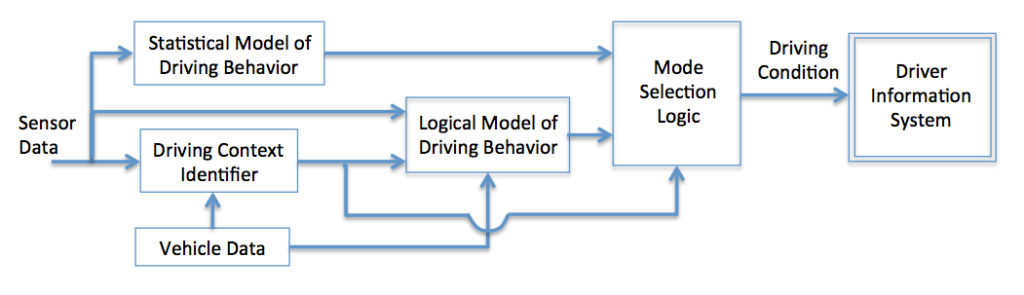
Figure 1. Schematic architecture
-
Driving simulator
The dSPACE driving simulator is used to collect data. It provides users with a complete vehicle model. Furthermore, it is easy to change the weather and road design. The software can be connected to Simulink so that any system that we develop can be tested.
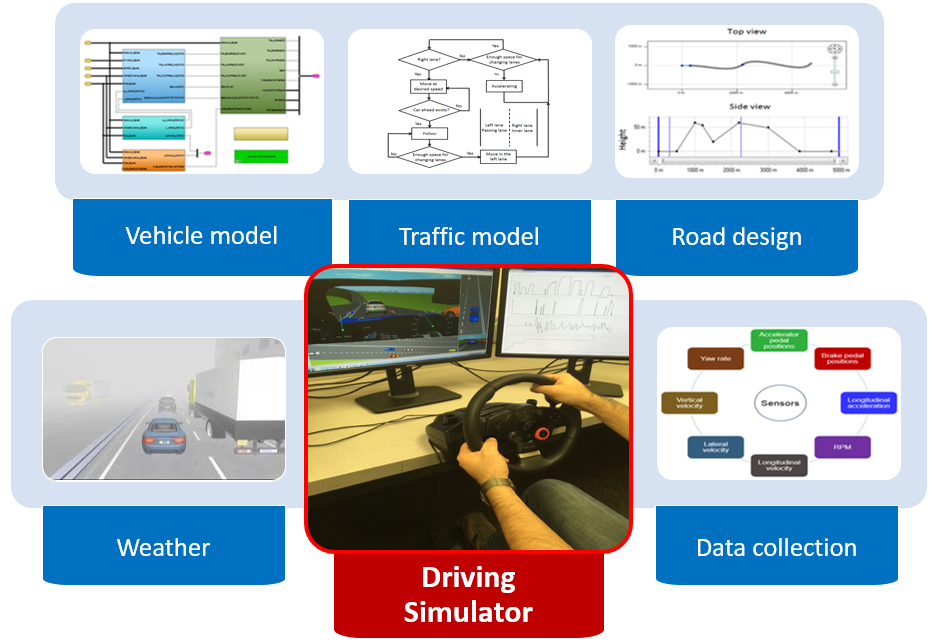
Figure 2. dSPACE driving simulator
-
Detectors
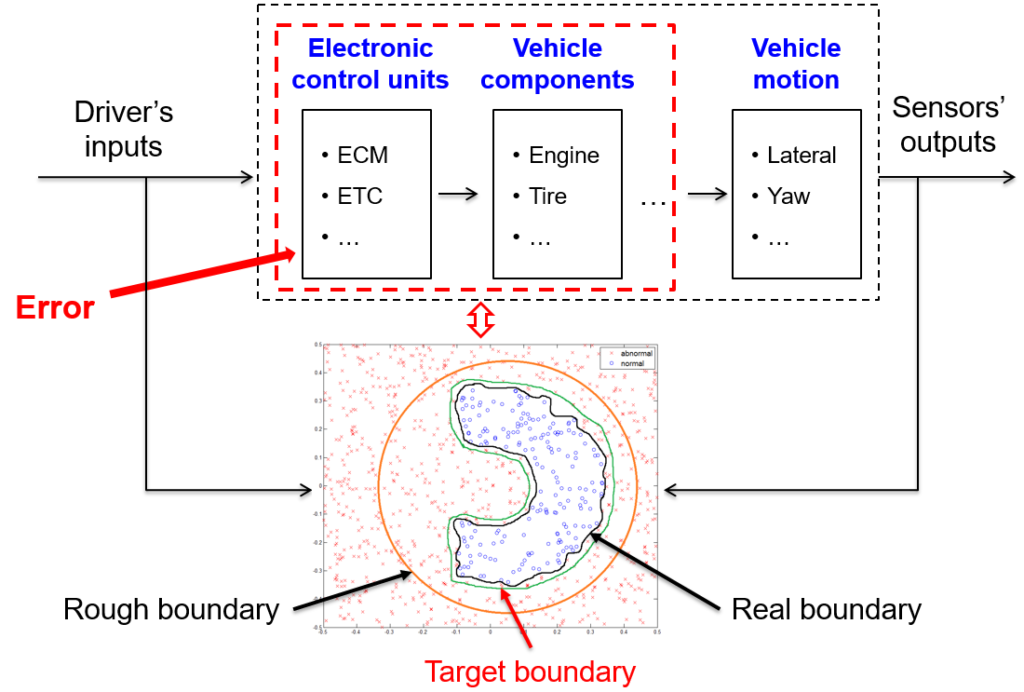
Figure 3. Data-driven detector
The data-driven detector was developed based on artificial neural networks. Experiments were designed and conducted in the Simulink/dSPACE environment to gather data for both normal and abnormal vehicle behavior. UA errors were simulated so that they occurred randomly when human subjects drove virtual cars in a simulated environment. It can be seen that the detector can give at least one warning to an error. There is no false alarm even when the driver’s inputs change at a high frequency. In particular, the detector can detect errors that occur when the gas pedal is pressed.
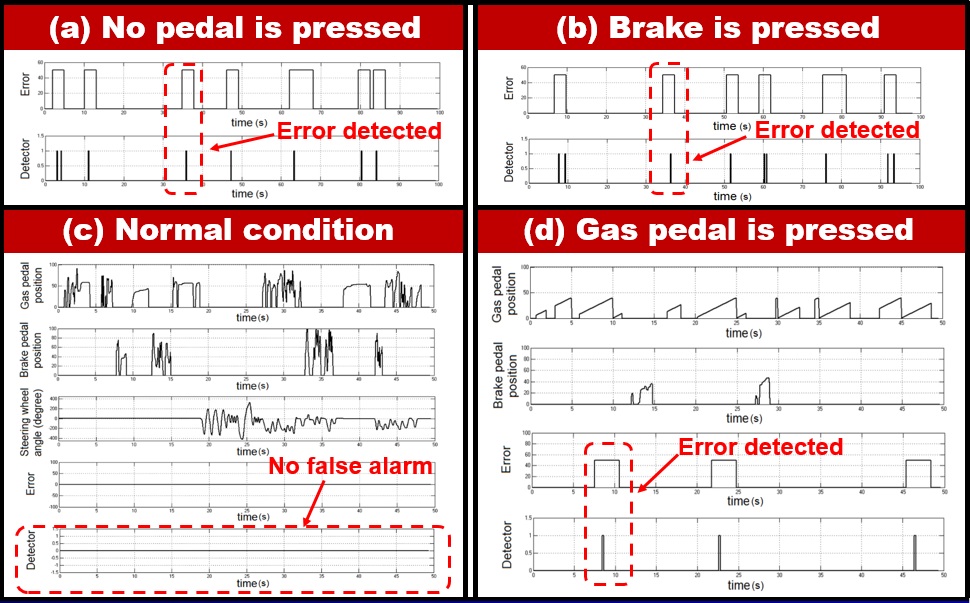
Figure 4. Test results
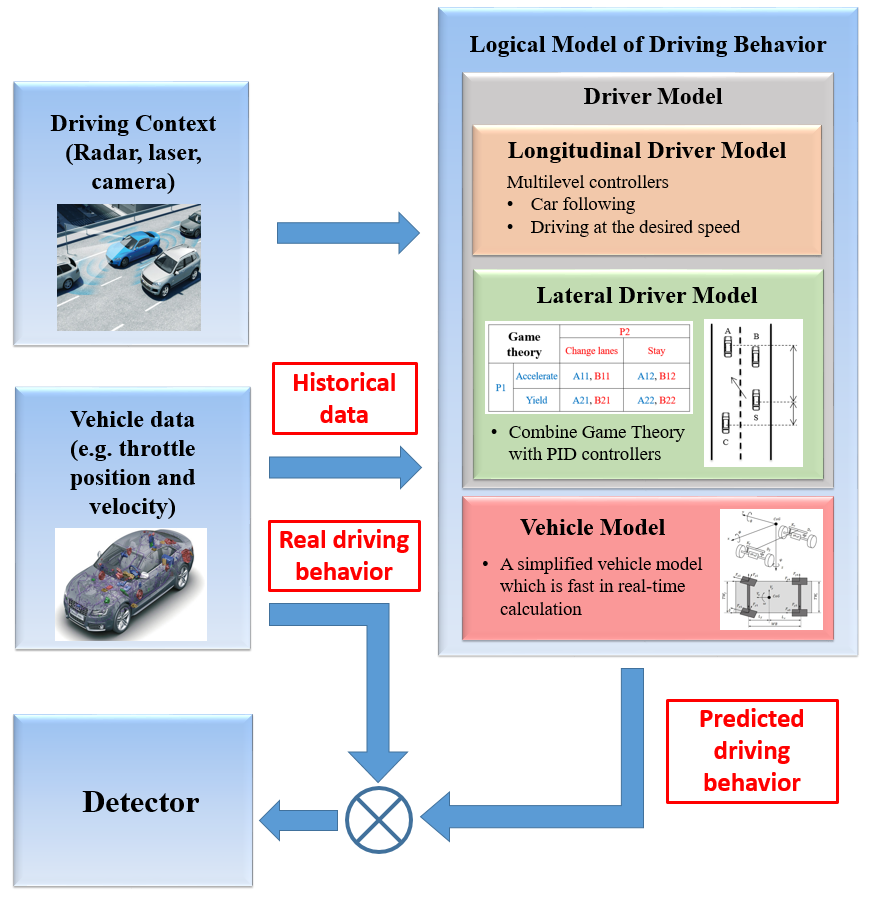
Figure 5. Driver model-based detector
Besides the data-driven detector, an adaptive and rational driver model was developed for a human driver. When the behavior of the vehicle driven by a human driver deviates greatly from the predicted behavior, the system concludes that an error has occurred.
-
Brake assist
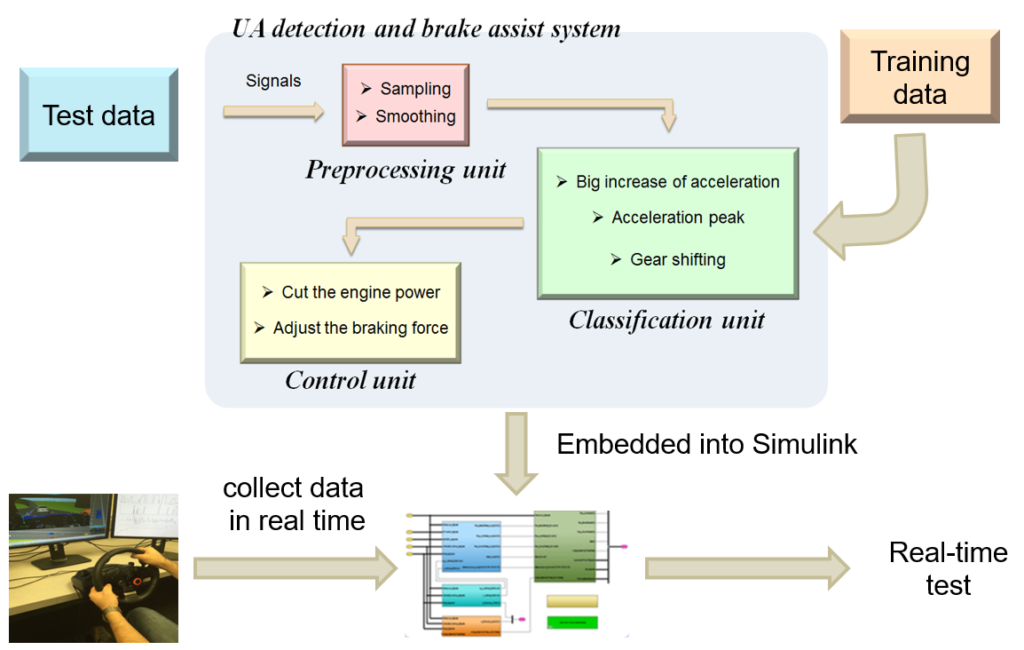
Figure 6. UA detection an brake assist system
The entire system consists of three parts. At the beginning, a preprocessing unit samples and smooths data. Processed signals are sent to a classification unit, which decides if an error has occurred. If the system detects an error, a control unit cuts the engine power and adjusts the braking force to prevent accidents. The whole system was embedded into Simulink for real-time tests.
Video one: a vehicle without brake assist encounters unintended acceleration