Contributors:
Rana Soltani Zarrin, Amin Zeiaee
Kinematic Design:
Design of exoskeletons is a challenging task. Due to the complexity of human biological joints, developing a mechanical structure that complies with the natural motion of the body is challenging. This challenge is even more significant in upper-limb exoskeletons due to the complexities of the shoulder joint. Kinematic compatibility between an orthotic device and human body is necessary to ensure that natural motion of body is not restricted and the interaction is comfortable. Avoiding singularities, achieving the required workspace, and maximizing dexterity of the manipulator are some of the other design challenges. Close interaction of the exoskeletonwith human body, imposes additional constraints such as preservation of normal ranges of motion, compactness, and prevention of physical interference between the device and the user. On the other hand, to increase usability of the developed device in multiple rehabilitation settings such as hospitals and home, the designed exoskeleton should be compact and low-weight.
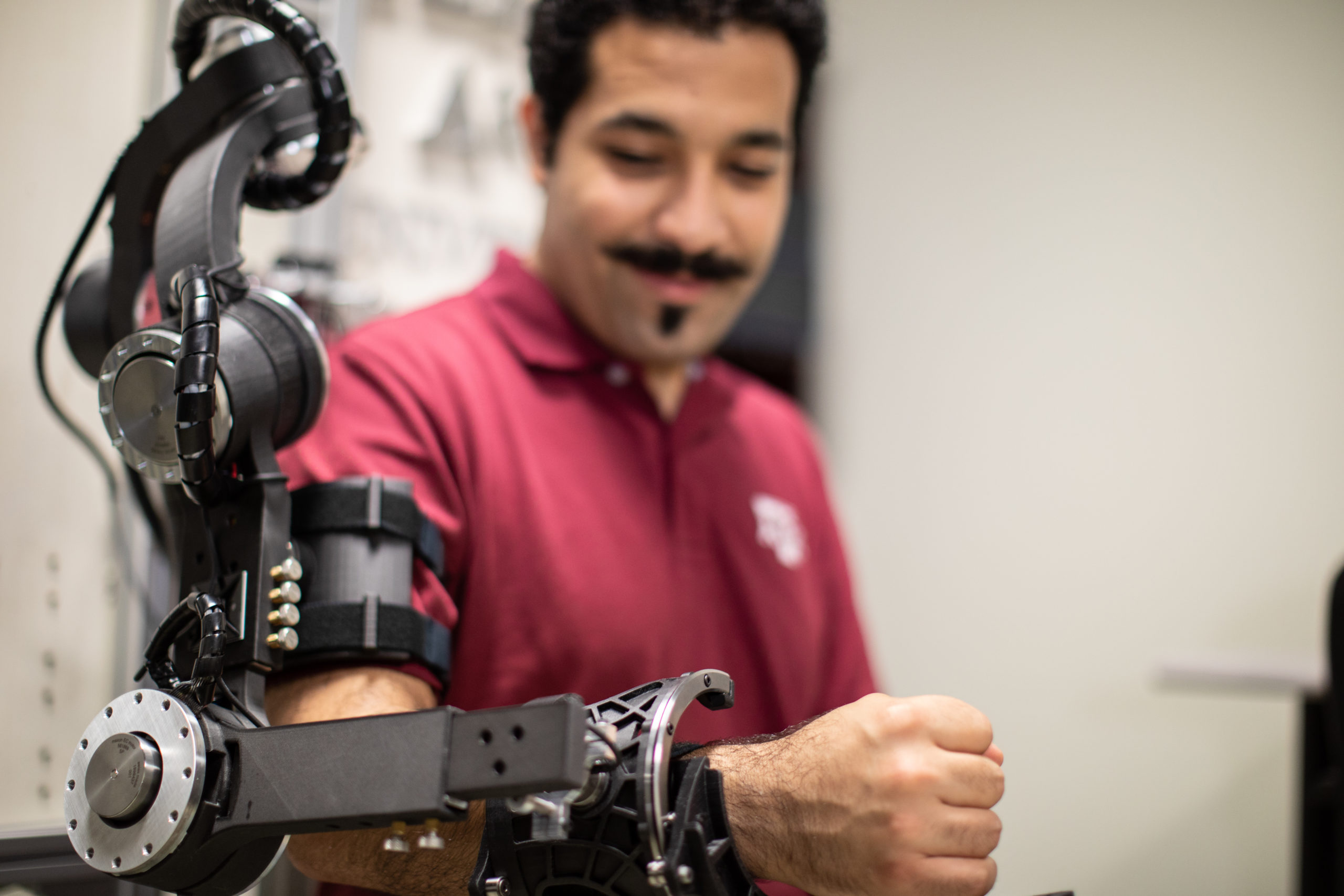
Formal conceptual design techniques are used for systematic kinematic design of the CLEVERarm. The developed upper-limb exoskeleton can support the elevation/depression of of the shoulder, Flexion/Extension, Abduction/Adduction and Internal/External rotations of the upper arm, Flexion/Extension of the elbow, Pronation/Supination of the forearm and Flexion/Extension of the wrist.
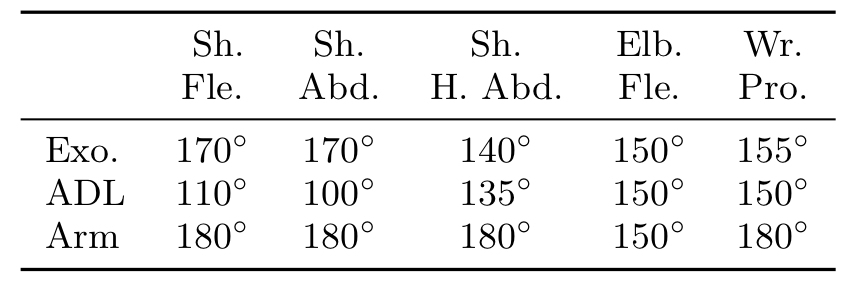
Through the kinematic analysis, it is shown that the exoskeleton is capable of supporting the range of motion required for upper-limb rehabilitation. Table below presents the achievable range of motion of the CLEVERarm and the comparison between the range of motion of the upper-limb Activities of Daily Living (ADL) as well as the range of motion achievable by a healthy human arm.
Design optimization:
Using a multi-disciplinary optimization approach to achieve maximized manipulability in the workspace while minimizing the volume occupied by the exoskeleton, has been the main focus of the kinematic design optimization for this device. Post optimality and sensitivity analysis are performed on the optimal solution and it is shown that the optimal point is not sensitive to the design variables and the parameters. The optimization resulted in 54% improvement in the objective function from the base-line conceptual design. Additionally, applying optimization techniques in the manufacturing phase of the exoskeleton development, has resulted in a low weight device which increases transportability of the developed upper-limb exoskeleton. Design of such low-weight compact upper-limb exoskeletons will pave the path toward increased robotic-based rehabilitation and will enable the long-awaited home based therapy.
Related articles:
-
- Soltani- Zarrin, A. Zeiaee, A. Eib, R. Langari, “CLEVERarm: A Novel Light-weight Upper-limb Exoskeleton for Home-based Rehabilitation”, (under review).
- A. Zeiaee, R. Soltani-Zarrin, R. Langari, & R. Tafreshi, “Kinematic Design Optimization of an Eight Degree-of-Freedom Upper-Limb Exoskeleton”. Robotica, 1-14, 2019.
- A. Zeiaee, R. Soltani-Zarrin, R. Langari, R. Tafreshi, “Design and kinematic analysis of a novel upper limb exoskeleton for rehabilitation of stroke patients” , Proceedings of IEEE 15th International Conference on Rehabilitation Robotics, London, 2017.
- R. Soltani-Zarrin, A. Zeiaee, A. Eib, R. Langari, N. Robson and R. Tafreshi, “TAMU CLEVERarm: A novel exoskeleton for rehabilitation of upper limb impairments”, IEEE proceedings of 2017 International Symposium on Wearable & Rehabilitations Robotics (WeRob), Houston, 2017. 10.1109/WEROB.2017.8383844
- R. Soltani-Zarrin, A. Zeiaee, and R. Langari, “Challenges and Opportunities in Exoskeleton-Based Rehabilitation”, (under review).