Introduction:
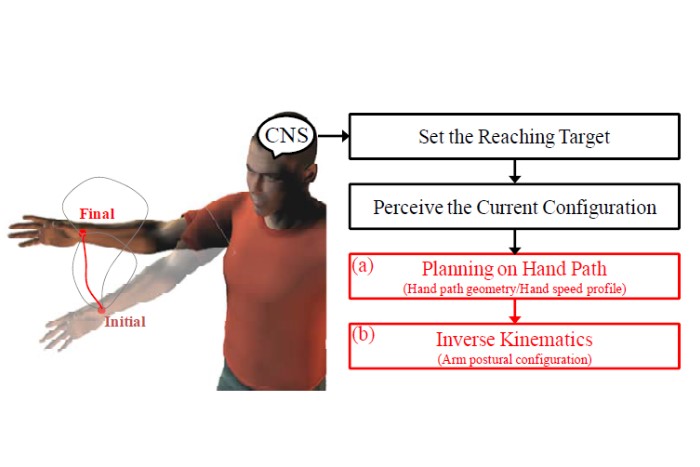
- The human arm can perform versatile reaching actions to achieve various goals in activities of daily living. For the motion planning of a point–to–point reaching task, the CNS (central nervous system) resolves two redundant mapping problems: 1) hand trajectory formulation and 2) arm posture selection.
- This research seeks to identify the governing rules implemented in the CNS to solve such redundancies from experimental observation approach.
- The novelty of this work is in the obtained motion planning results for a constraint elbow joint during reaching movements. The authors believe that the CNS generates the motion by following the governing rules despite reduced arm mobility and this enables us to tap into fundamental principles of the human motor coordination with the redundancy resolution.
- Specifically, the paper discusses point-to-point reaching motions performed by multiple subjects with an elbow locking brace.
Experimental Setup and Procedure:
- In order to observe governing rules of the human CNS on two main redundancy resolutions in point-to-point reaching actions (i.e., the hand path formulation and the arm posture selection), a reaching experiment is designed.
- During the experiment, the wrist motion was minimized by a stabilizing brace (AirCast A2 Wrist Brace, DJO Global Inc., USA) and the subject’s trunk motion was restrained on a high-back chair with elastic bands to restrict the movement of the shoulder joint (i.e., center of the constraint workspace) in the space.
- Four target points were displayed on a computer monitor and twelve reaching directions were defined among those targets as shown in figure 1:
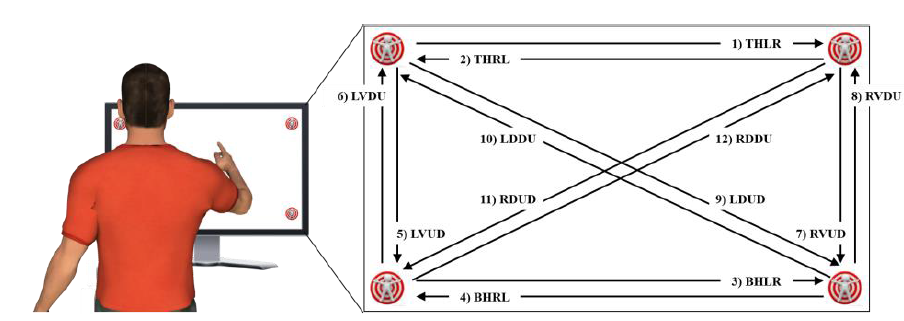
Figure 1. Front view of the target display and reaching directions defined among 4 target points
- To realize the kinematic constraint condition with minimal effects on the arm dynamics, a light weight elbow brace was adopted. The elbow joint angle was fixed at δ=60º.
- To induce the most natural motions, all subjects were asked to perform ten reaching trials for each defined direction in their self-selected speeds.
- During the experiments the motion kinematics was captured by a mobile motion capture system prototype. Three IMU sensors were attached on the subject’s trunk, upper arm and forearm regions to capture the motion kinematics and four EMG sensors were attached on the subject’s anterior and posterior deltoids, biceps brachii and triceps brachii muscles to acquire muscle activation. Figure 2 shows the experimental set up:
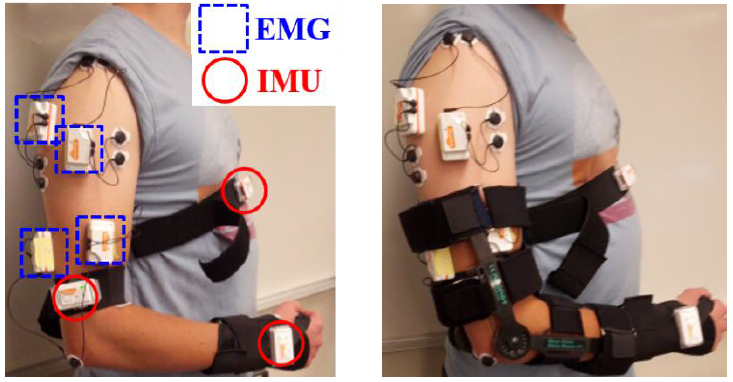
Figure 2. The experimental Set up
Experimental Observations:
Observations on the hand path geometry:
It is assumed that the governing rules emphasize the efficiency of motion to resolve the redundancy problems
Since the CNS focuses on hand kinematics during reaching motions, it is hypothesized that the hand path geometry is determined to cost the least kinematic efforts
(LKE). Two candidate models are considered in the ETC: the geodesic curve and the rhumb line (loxodrome).
Selected experimental results of a subject with 60º elbow locked condition are compared to corresponding geodesic curves and rhumb lines in Figure 3.
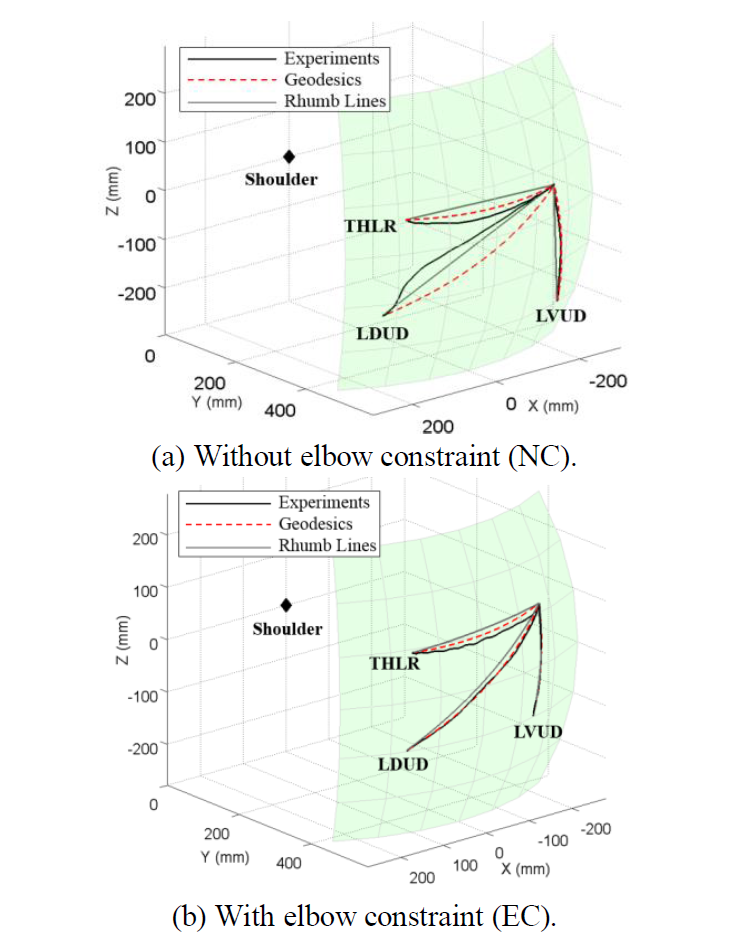
Figure 3. Hand Path Comparison
Observations on the hand path geometry:
- The intrinsic relationship between the hand path geometry and the speed profile is studied. The planned hand path needs to be segmented into small pieces to form a real-time reference trajectory by a governing rule in the CNS.
- For each subject, the model outputs (m-MJ, c-MJ, c-κτ-PL and uc-κτ-PL) are compared with the experimental data (EXP) in figure 4. It is important to note that there was no instruction regarding the movement speed during the experiment and each subject performed the motions with their self-selected speed.
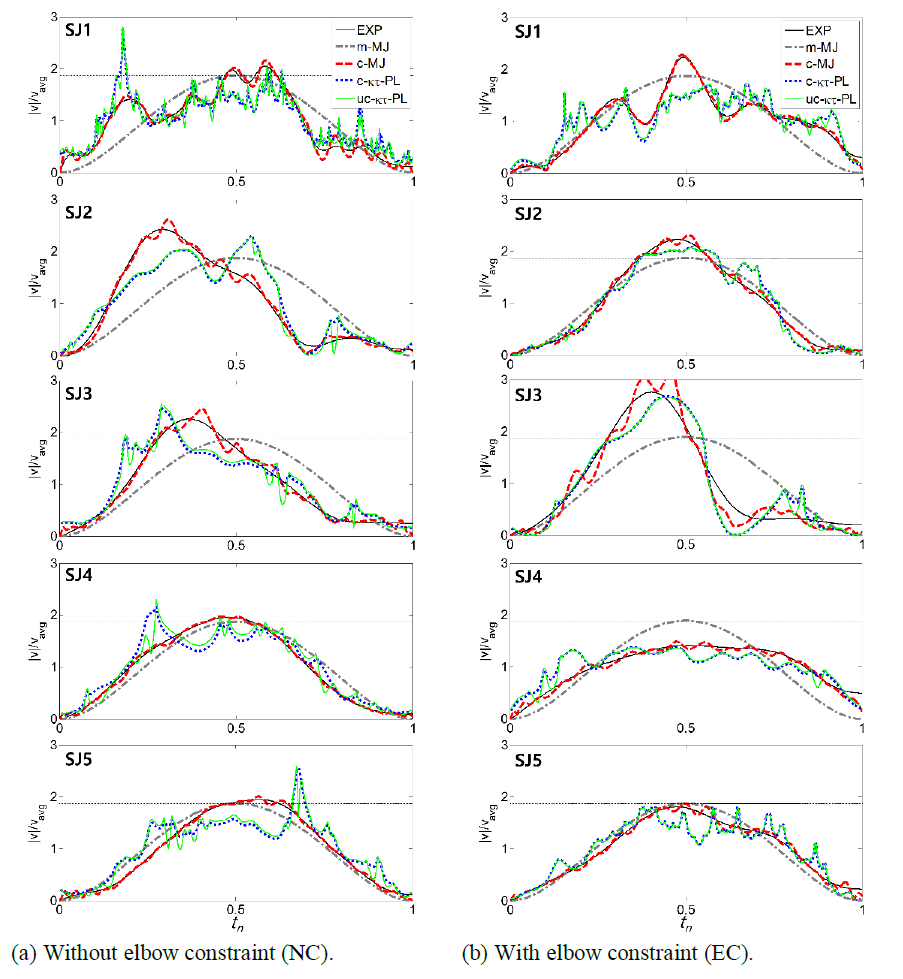
Figure 4. Hand Speed Profile using Different Models
- As shown in fig. 5, the models have higher correlations with the experimental speed profile in an order of c-MJ > uc-κτ-PL ≥ c-κτ- PL > m-MJ for all subjects regardless of the elbow constraint condition.
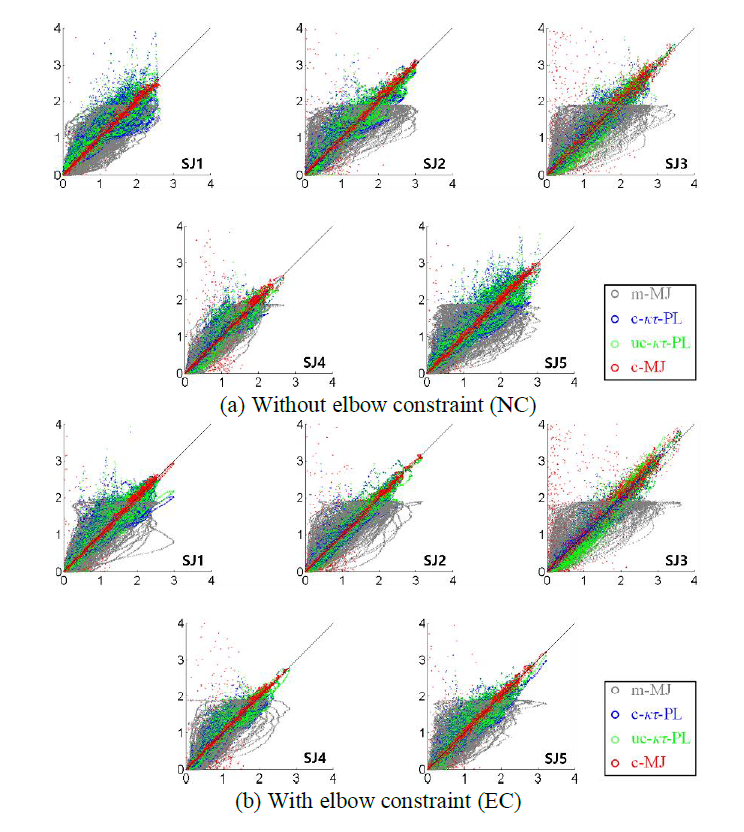
Figure 5. Scatter data of the experimental data and model data for each subject
Redundant Inverse Kinematics: Arm Posture Selection
- In the ETC, the elbow swivel angle ψ is the single variable to govern the arm posture selection for a given hand position.
- Since most of the conscious attention is on the hand trajectory formulation during a point-to-point reaching, the arm posture selection mechanism should be considered in internal body coordinates (i.e., IJC), which is considered to be directly linked to the unconscious level of the CNS.
- Overall, it is considered that the CNS coordinates the elbow constrained arm to cost minimum kinetic energy (MKE) to drive the arm plane while the hand path geometry tracks LKE (least kinematic effort: i.e., either the geodesic curve or the rhumb line).