
Motor impairments are one of the most common categories of impairments in neurological disorders. Recovery of patients suffering from neurological disorders, such as stroke, depends on early availability of intensive repetitive trainings. But, labor intensiveness and boring nature of manual rehabilitation techniques limit the recovery for these patients. With the increasing prevalence of neurological disorders in aging societies, and lack of sufficient resources for providing effective rehabilitation, employing robotic systems to provide intense and lengthy therapy is an efficient and inevitable approach. Exoskeletons’ capability in providing support and control for individual joints of the affected limb, makes them a desirable candidate for robotic-based rehabilitation techniques.
Our research effort is focused on developing robotic technologies to be used in rehabilitation settings and home, to improve rehabilitation of stroke patients. To this end, CELEVERarm (Compact, Ergonomic, Low-weight, Virtual/Augmented reality Enhanced Robotics arm), a new upper-limb rehabilitation exoskeleton, is designed and developed in the Laboratory for Control, Robotics and Automation. Check the YouTube video below to find out more from the developers of the CLEVERarm:
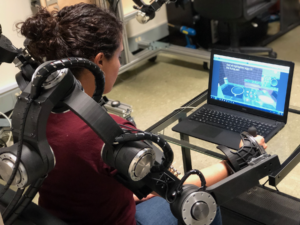
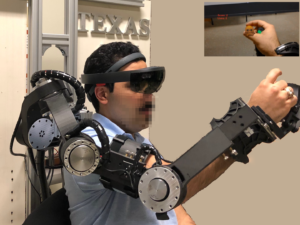
CELEVERarm is an 8 degree of freedom exoskeleton that can support the motions of the inner shoulder, Glenohumeral joint, elbow, and wrist joints. The optimized kinematic design as well as the electromechanical design of the system including the choice of components and body material, resulted in a compact and lightweight device which can support the necessary motions of the upper-limb. While the developed system can be operated under full therapist control, the autonomous motion generation and control algorithms developed for the system allow using the system autonomously. For example, a new motion generation algorithm is developed for the exoskeleton which can generate human-like upper-limb motions. Various new control algorithms compliant with the rehabilitation needs are developed for the exoskeleton which enable the device to provide appropriate assistance to patients with different levels of disability. Immersive rehabilitation games are developed in the virtual and augmented reality environments. Integration of the developed games with CLEVERarm are intended to increase patient compliance.
Additional features of CLEVERarm:
- Light-weight
- Adjustable for different patient sizes
- Can be used on either left or right arm
- Various control modes to offer patient specific rehabilitation
- Suitable for inpatient, outpatient, PT/OT rehabilitation clinics
- Extendable to home setting
- Library of games
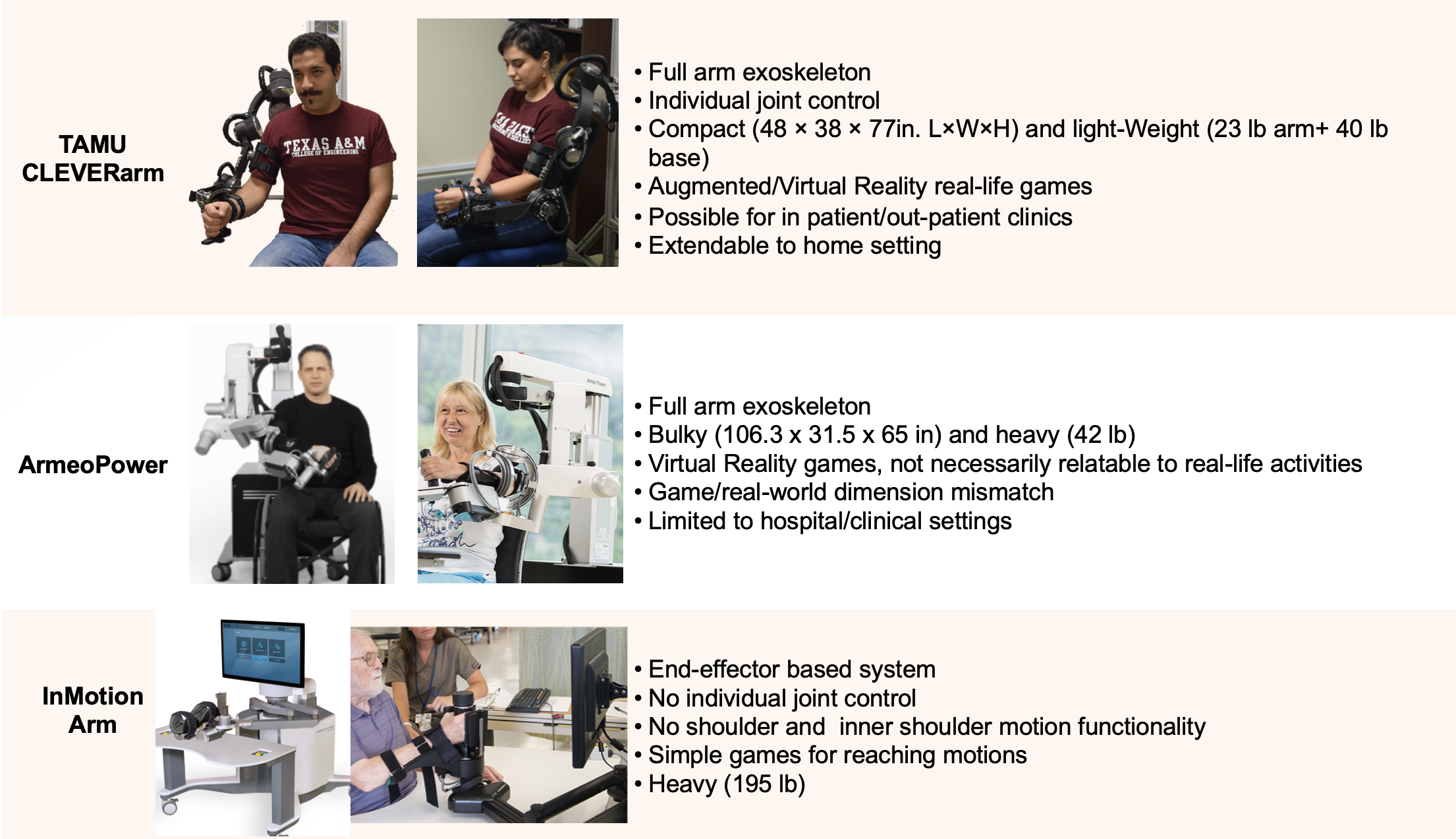
Comparison with available technologies:
Contributors:
Rana Soltani Zarrin, Amin Zeiaee, Andrew Eib


Virtual/Augmented Reality based Rehabilitation Game Development
Related articles:
- R. Soltani- Zarrin, A. Zeiaee, A. Eib, R. Langari, “CLEVERarm: A Novel Light-weight Upper-limb Exoskeleton for Home-based Rehabilitation”, (under review).
- R. Soltani- Zarrin, A. Zeiaee, R. Langari, “Human-like Path Generation in Upper-limb Exoskeletons”, (under review).
- R. Soltani- Zarrin, R. Langari, “A Minimum Intervention Controller for Upper-limb Rehabilitation Exoskeletons”, (under review).
- A. Zeiaee, R. Langari, “Time-independent Control of Upper-limb Rehabilitation Exoskeletons”, (under review).
- A. Zeiaee, R. Soltani-Zarrin, R. Langari, & R. Tafreshi, “Kinematic Design Optimization of an Eight Degree-of-Freedom Upper-Limb Exoskeleton”. Robotica, 1-14, 2019.
- A. Zeiaee, R. Soltani-Zarrin, R. Langari, R. Tafreshi, “Design and kinematic analysis of a novel upper limb exoskeleton for rehabilitation of stroke patients” , Proceedings of IEEE 15th International Conference on Rehabilitation Robotics, London, 2017.
- R. Soltani-Zarrin, A. Zeiaee, A. Eib, R. Langari, N. Robson and R. Tafreshi, “TAMU CLEVERarm: A novel exoskeleton for rehabilitation of upper limb impairments”, IEEE proceedings of 2017 International Symposium on Wearable & Rehabilitations Robotics (WeRob), Houston, 2017. 10.1109/WEROB.2017.8383844
- R. Soltani-Zarrin, A. Zeiaee, R. Langari, N. Robson, “Reference Path Generation for Upper-Arm Exoskeletons Considering Scapulohumeral Rhythms”, Proceedings of 2017 IEEE 15th International Conference on Rehabilitation Robotics, London.
- R. Soltani-Zarrin, A. Zeiaee, R. Langari, and R. Tafreshi, “A Computational Approach for Human-like Motion Generation in Upper Limb Exoskeletons Supporting Scapulohumeral Rhythms”, IEEE proceedings of 2017 International Symposium on Wearable & Rehabilitation Robotics (WeRob), Houston, 2017.
- R. Soltani-Zarrin, A. Zeiaee, and R. Langari, “Challenges and Opportunities in Exoskeleton-Based Rehabilitation”, in submission to Journal of Topics in Stroke Rehabilitation, preprint in arXiv Robotics: 1711.09523, 2017.
- https://www.asme.org/engineering-topics/articles/bioengineering/exoskeleton-assists-road-to-recovery
- https://lcra.tamu.edu/our-article-about-future-of-rehabilitation-published-in-the-conversation-has-been-republished-in-various-news-websites-likeassociated-press/
- https://lcra.tamu.edu/our-research-featured-in-texas-am-news-letter-robotics-based-intelligent-therapy-for-stroke-victims